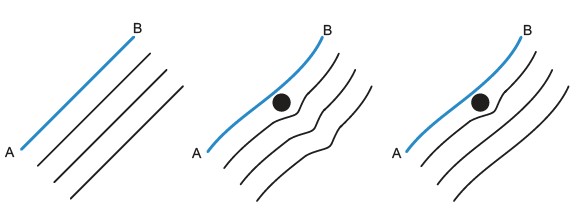
Die Parallelführung vom Maschinen und Geräten und das automatische Lenken von Fahrzeugen erfolgt über die Verwendung von Global Navigation Satellite System (GNSS)-Sensoren. Hierbei wird eine Referenzlinie erzeugt, welche aus dem Anfangspunkt A und dem Endpunkt B der ersten Fahrspur besteht (siehe nachfolgende Abbildung). Basierend auf der Arbeitsbreite des Anbaugeräts, berechnen Parallelführungs- und Lenksysteme parallele Linien. Fortlaufend wird der Spurfehler (Abweichungen der Referenzlinie) von den Systemen bestimmt, angezeigt und greifen in die Lenkung des Fahrzeugs ein. [1]

Der Nutzen von Parallelfahrsystemen zeigt sich vor allem in der Vermeidung von Überlappungen und Fehlstellen bei der Bodenbearbeitung, dem Pflanzenschutz, der Düngung und der Aussaat. Ein weiterer Vorteil ist die Einsparung von aufwendigen Wendevorgängen bei langen Gespannen, da Felder beetweise bearbeitet werden können. Bei schlechten Sichtbedingungen, wie Nebel oder starker Staubentwicklung, sind Parallelfahrsysteme uneingeschränkt funktionsfähig. Durch die Entlastung des Fahrers, kann dieser sich mehr auf das Anbaugerät konzentrieren. Somit können Schäden oder Fehlfunktionen am Gerät frühzeitig erkannt werden und die Qualität der Arbeit kann überwacht und optimiert werden. [2]
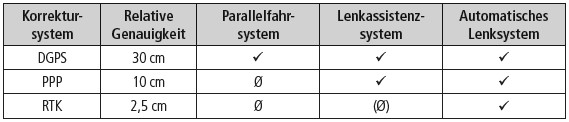
Für die Bestimmung der Abweichung von der Sollfahrspur nutzen Parallelführungs- und Lenksysteme überwiegend GNSS-Signale. Von den Korrekturdaten und vom Empfänger ist die Genauigkeit des eingesetzten Lenksystems abhängig (siehe folgende Abbildung).
Parallelführungs- und Lenksysteme funktionieren nach folgendem Prinzip: Zwei Referenzpunkte (Punkt A, Punkt B) werden währen der ersten Fahrt gesetzt und dementsprechend eine Gerade oder eine Kurve aufgezeichnet. Danach erfolgen die Eingabe der Arbeitsbreite oder die Auswahl des Gerätes und das System folgt einer angelegten oder parallel verlaufenden Fahrspur. [2]
Verschiedene Systematiken von Parallelführungen [2]:
Erstellung einer "Grün-auf-Braun" Spot-Applikationskarte
Applikationsmengen automatisch mit Telemetrie & ISOBUS dokumentieren
Lea Wintz, Wissenschaftliche Mitarbeiterin, Technische Hochschule Bingen