¶ Tierlokalisation
Die Tierlokalisation in der landwirtschaftlichen Nutztierhaltung umfasst die Positionsbestimmung von Tieren und die Speicherung oder Übertragung der Positionsdaten. Die Positionsdaten dienen dem Auffinden von Tieren und dem Erfassen von Tierverhalten. Die Methode zur Tierlokalisation richtet sich hauptsächlich nach den Anforderungen zur Genauigkeit, dem Lokalisationsintervall und dem abzudeckenden Bereich.
¶ Beschreibung
Die Tierlokalisation in der Nutztierhaltung lässt sich in den Stall- und den Außenbereich einteilen. Im Außenbereich der Weiden bieten sich globale Navigationssatellitensysteme (GNSS) wie das GPS an. Es sind bereits einige GNSS-Empfänger am Markt, die von Weidetieren als Halsband getragen werden können [1, 2]. Manche dieser GNSS-Empfänger speichern die Positionsdaten nur lokal, andere können diese über Mobilfunk (Global System for Mobile Communication - GSM) bzw. Long-Range Wide Area Network (LoRaWAN) übertragen. Die Messunsicherheit von GNSS-Empfängern beträgt mehrere Meter und kann durch zusätzliche GNSS-Korrektursignale auf einige Zentimeter verringert werden [3]. Die Akkulaufzeit der GNSS-Empfänger hängt stark vom Lokalisationsintervall und dem etwaigen Übertragungsintervall der Daten ab [4]. In einer Studie mit Rindern auf einer Alm erreichten GNSS-Empfänger mit einem Lokalisationsintervall von 20 Minuten und der Versendung der Daten über Mobilfunk weniger als 6 Monate Akkulaufzeit [5]. In einer anderen Studie erreichten GNSS-Empfänger mit einer Messauflösung von einer Sekunde ohne Datenübertragung eine Akkulaufzeit von 6 Wochen [6]. Um aus den Positionsdaten auf das Tierverhalten schließen zu können, ist eine hohe Lokalisationsfrequenz und -genauigkeit notwendig. Nötige Akkuwechsel innerhalb einer Weideperiode schränken wiederum die Nutzbarkeit in der Praxis ein.
Innerhalb von Ställen ist die Verwendung von GNSS-Empfängern nicht möglich, da diese freie Sicht zu mehreren Satelliten benötigen. Durch die geringere Fläche kann eine eigene Infrastruktur mit Funktechnologie aufgebaut werden. Auf der Bluetooth Low Energy (BLE) Technologie basierende Systeme bestehen aus am Tier getragenen Beacons und im Stall positionierten Empfangsstationen [Abbildung 1]. Beacons sind kleine Bluetooth Sender, die in Zeitabständen von 0,1 bis 1 Sekunde Datenpakete senden. Die Reichweite bei kommerziell verfügbaren Systemen beträgt im freien Raum bis zu 40 m. Die Empfänger in Sendereichweite protokollieren die Empfangsstärke der Datenpakete. Es gibt verschiedene Ansätze, um aus dem Zusammenhang von Signalstärke und Abstand zwischen Sender und Empfänger, die Position der Sender zu bestimmen. Der größte Einflussfaktor auf die Genauigkeit der Positionsbestimmung ist die Signalabsorption und -reflexion durch Stalleinbauten. Je nach Ausführung beträgt die Akkulaufzeit von Beacons einige Monate bis Jahre. [7]

Ab der Version 5.1 des Bluetooth Low Energy Standards können Empfänger mit Antennenarrays zusätzlich erkennen, aus welcher Richtung das Signal kommt. Wird ein Signal von mindestens 3 Empfängern aufgenommen, kann über Triangulation die Lokalisationsgenauigkeit erhöht werden. [8]
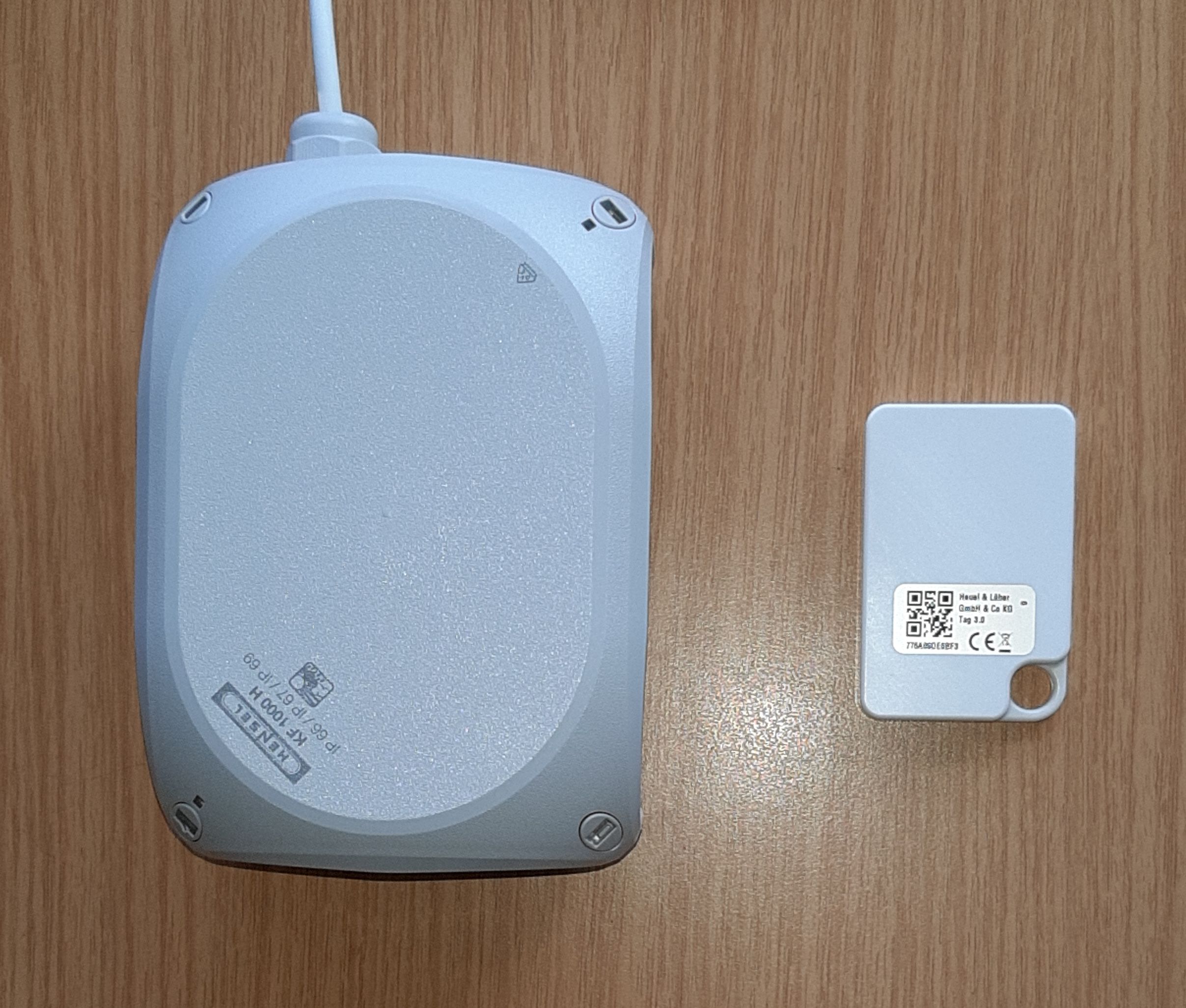
Ultra-wideband (UWB) ist eine weitere Technologie, die für die Lokalisation eingesetzt wird. Es gibt derzeit kommerziell verfügbare Systeme für die Lokalisation von Waren, Maschinen und Personen. Das System besteht aus fest verbauten Anchors und mobilen Tags, deren Position ermittelt wird [Abbildung 2].
Der Abstand zwischen den Anchors und den Tags wird durch Signallaufzeitmessungen ermittelt. Sind mindestens 4 Anchors in Sendereichweite eines Tags, ist die Positionsbestimmung durch Multilateration möglich. Besteht eine Sichtverbindung zwischen den Anchors und dem Tag kann die Position auf 5 bis 30 Zentimeter genau ermittelt werden.
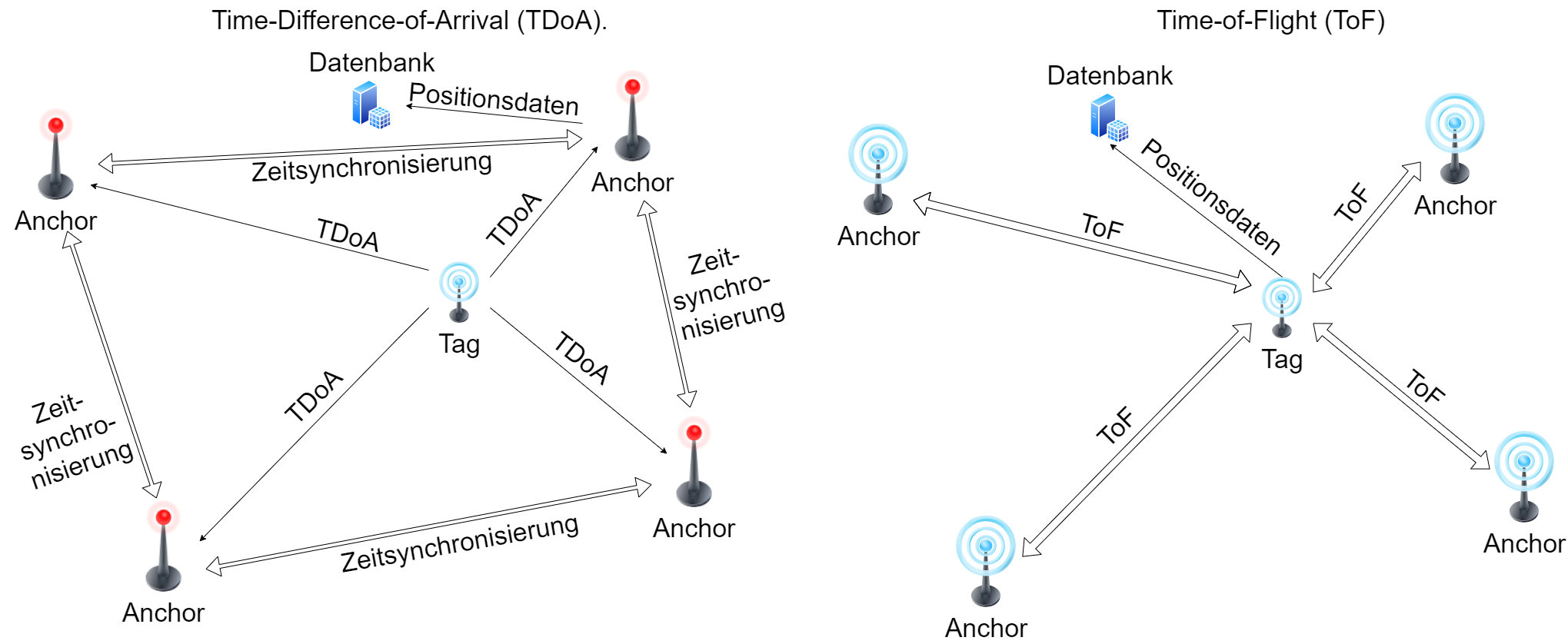
Die beiden verbreitetsten Verfahren der Signallaufzeitmessung sind Time-of-Flight (ToF) und Time-Difference-of-Arrival (TDoA). Beim TDoA-Verfahren sendet der Tag ein Signal aus, die Anchors empfangen dieses Signal nach einer Verzögerung, die proportional zu ihrem Abstand zum Tag ist. Um aus diesen Zeitdifferenzen auf den Abstand zwischen dem Tag und den Anchors schließen zu können, müssen alle Anchors zeitsynchronisiert sein. Beim ToF-Verfahren kommuniziert der Tag bidirektional mit jedem Anchor und ermittelt aus der Signallaufzeit die Abstände zu jedem Anchor einzeln. Im Vergleich erreicht das TDoA-Verfahren deutlich höhere Akkulaufzeiten der Tags. Beim ToF-Verfahren kommunizieren die Tags mit allen Anchors in Reichweite bidirektional. Dadurch ist die Anzahl möglicher Anchors und Tags in einem UWB System begrenzter als beim TDoA-Verfahren. [Abbildung 3][9]
Passive Sender (z.B. RFID) in Form von Ohrmarken und Boli können Tiere in der Nähe von Lesegeräten lokalisieren. Die Lokalisation erfolgt an Punkten von besonderem Interesse, wie beispielsweise dem Futtertrog oder einer Wiegeeinrichtung. Passive Sender werden über magnetische Wechselfelder vom Lesegerät mit Energie versorgt und benötigen daher keine eigene Energieversorgung. Die Lesereichweite ist auf einige Zentimeter begrenzt. [10]
Als Assistenzsystem im Herdenmanagement sollte die Lokalisation mit weiteren Sensordaten verknüpft werden, um das Tierverhalten und das Tierwohl besser beurteilen zu können. [11]
¶ Anwendungsbereich
(hier folgen passende Praxisbeispiele)
¶ Quellen
- Dr. Jan Maxa & Stefan Thurner: Klappt die GPS-Ortung von Weiderindern?, top agrar, August 2016, S. R24
- Mit GPS die Weidetiere immer im Blick: B. Kraml
- DLG-Merkblatt 388 - Satellitenortungssysteme (GNSS) in der Landwirtschaft
- Wie lange hält der Akku eines GPS-Trackers?: A. Müller
- Evaluation of different global navigation satellite tracking systems and analyses of movement patterns of cattle on alpine pastures: J. Maxa et al.
- Inferring Behavioral States of Grazing Livestock from High-Frequency PositionData Alone: H. Homburger et al.
- A Low Cost Indoor Positioning System Using Bluetooth Low Energy: L. Bai et al.
- Bluetooth® Low Energy (LE) Direction Finding: Rohde & Schwarz GmnH & Co. KG
- TDoA vs ToF in Ultra Wideband RTLS: Eliko
- Elektronische Kennzeichnung von Schafen und Ziegen zum Zweck der Rückverfolgbarkeit: LfL-Schriftenreihe
- Tierortungssysteme – heutiger Nutzen und zukünftige Weiterentwicklung: C. Umstätter & F. Adrion
¶ Autoren
Dipl. Ing. (FH) Rainer Kock, Technischer Mitarbeiter im Experimentierfeld Betriebsleitung und Stoffstrommanagement - Vernetzte Agrarwirtschaft in Schleswig-Holstein (BeSt-SH)