¶ Positionsdatenempfänger
Ein Positionsdatenempfänger ist ein Satelliten –oder GNSS-Empfangsgerät, mit dem die lokale Position festgestellt wird.
¶ Beschreibung
Um die eigene Position zu bestimmen, werden von Satelliten Signale ausgesandt. Mit einem Empfänger können diese aufgenommen werden und durch Laufzeitberechnungen die eigene Position ermittelt werden. Ein solcher Positionsdatenempfänger ist eine Einheit aus 2 Bestandteilen. Zum einen die Antenne, zum anderen die Empfänger, welcher die Signale verarbeiten. Im Empfänger werden die Signale in Längen –und Breitengrade umgewandelt. Geräte können ein oder zwei Antennen besitzen [1].
¶ Aufbau & Funktionsweise
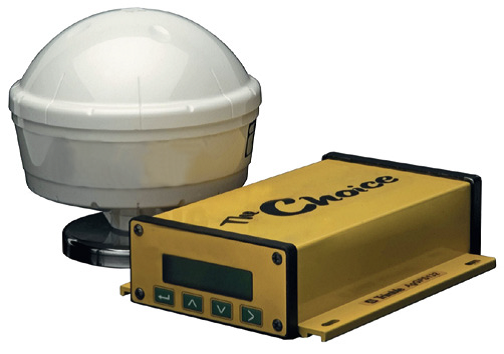
Wie bereits beschrieben, bestehen GNSS-Sensoren aus Antenne und Empfänger, der die Rechenarbeit zur Verarbeitung der Signale darstellt. Smartantennen (Abb. 1) integrieren beide Komponenten. Sie sind sinnvoll, wenn sie als Teil von Lenksystemen oder Anbaugeräten verwendet werden. [6]

Die Güte vieler Geräte unterscheidet sich durch Bauform und Qualität [6]. Weitere Bauformen stellen die nachfolgenden Abbildungen dar.

Die Positionsbestimmung funktioniert nur über drei Komponenten: Raum,- Kontroll -und Benutzersegment. Ersteres sind die Satelliten, die in der Erdumlaufbahn kreisen. Die Umlaufgeschwindigkeit beträgt 11h 58min und 2s. Mit dem Stand von 2015 bestehen sechs gleich weit voneinander entfernte Umlaufbahnen, die mit mindestens vier Satelliten ausgestattet sind. Sie senden die Trägerwellen mit Lichtgeschwindigkeit aus, dessen Frequenzen festgelegt sind. Sie werden vom Empfänger zwingend benötigt. Das Kontrollsegment sind Bodenstationen. Sie verfolgen, steuern und übermitteln Infos an die Satelliten. Die Takte der Satelliten werden damit synchronisiert. Das Benutzersegment betrifft den Empfänger, der in einem Endgerät verbaut ist. Unter anderem Smartphones, Drohnen oder ganz klassisch Navigationsgeräte. [1]
GNSS-Empfänger senden selbst keine Signale an den Satelliten! Sie agieren vollkommen passiv. Nur beim Galileo-System können nach Einstellung, Notfallinformationen weitergegeben werden. Beim Empfang eines Signales, empfängt das verwendete Gerät die Satellitensignale und übermittelt die Position. Die Form der Daten entspricht dem geografischen Koordinatensystem WGS84, Länge/Breite, sowie dem EPSG 4326. Wenn die Position bekannt ist, wird diese an ein anderes System übermittelt, wie GSM-Datenverbindungen oder Überwachungsstationen. [1]
GNSS bezeichnet den Sammelbegriff für verschiedene Ortungssysteme wie GPS, GLONASS oder ähnliches. Sie greifen auf mehrere Satelliten zu. Das GPS wird zwar als GNSS eingestuft, der Empfänger schafft es allerdings auch durch festes Material, ein Signal zu empfangen. Bei starken zu erwartenden Signalen wird GPS empfohlen. Bei schwachen hingegen ein GNSS-Empfänger. [3]
Die Genauigkeit der Sensoren hängt davon ab, wie hochwertig die in der Antenne verbauten Materialien, sowie die technische Genauigkeit der Signalfilterung, der Algorithmen der Signalverarbeitung, der Verfügbarkeit der Satelliten und deren Konstellation sowie das Störpotenzial der Atmosphärenschichten ist. In langfristigen Messungen ergibt sich die Genauigkeit als RMS (65-68%) oder 2 RMS (95%) Wert. Die Zahlen sagen aus, dass die Sensoren eine um diesen Wert geringere Abweichung zur Referenz aufweisen, als der angegebene Wert. Grundsätzlich sind die Sensoren genauer, wenn sie in Bewegung sind, weil sie in diesem Fall aus dem Doppler-Effekt Gebrauch machen. Daher wird zwischen statischer und dynamischer Genauigkeit unterschieden. Wie stark sich diese Fehler auswirken stellt Tabelle 1 dar. [6]
Tabelle 1: Ursachen von Zeitfehlern [6]
| Fehlerquelle | Zeitfehler | Positionsfehler |
| Satellitenposition | 6-60 ns | 1-10 m |
| Zeitdrift | 0-9 ns | 0-1,5 m |
| Ionosphäre | 0-180 ns | 0-90 m |
| Troposphäre | 0-60 ns | 0-10 m |
Spricht man von Genauigkeit, wird zwischen dreierlei unterschieden.
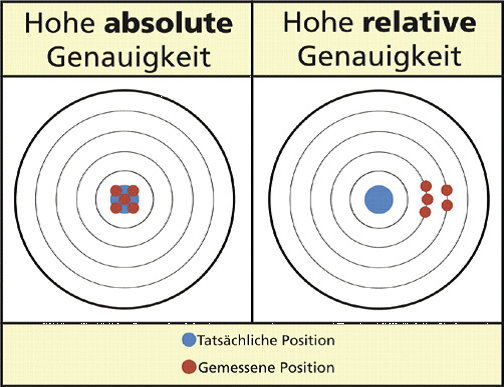
Zum einen die absolute Genauigkeit, die die wahre Position der Antenne als Referenz zum Messwert abgleicht. Die Abweichung wird dann anhand der Qualitätsmaße dargestellt (Abb. 4). Bedeutsam ist diese Art der Genauigkeit bei Controlled Traffic, Strip Tillage und Dauerkulturen. [6]

Relative Genauigkeit hingegen ist der Vergleich zwischen mehreren Positionsmessungen in kurzem Abstand zum Referenzwert (Abb. 5). Das kann bei der Messung der Größe einer Fläche nützlich sein, sowie bei Teilbreitenschaltung oder Parallelführungssystemen. [6]
Zuletzt ist noch die Spur-zu-Spur-Genauigkeit zu nennen als Form der relativen Genauigkeit. Dargestellt wird der Genauigkeitsbereich neben einer Fahrspur, der für min. 15 min befahren wird. Beispielhaft bedeuten „20 cm Spur-zu-Spur-Genauigkeit, dass ein Fahrzeug innerhalb 15 min 95% der Zeit weniger als 20 cm von der Fahrspur abweicht“. [6]
¶ Empfänger in der Landwirtschaft
Empfänger in der Landwirtschaft sind unter anderem der FieldBee RTK-Empfänger [2]. Dabei handelt es sich um einen Sensor, der die Genauigkeit von GPS verbessert und RTK-Signale empfangen kann. Er wird auf dem Dach der jeweiligen Maschine platziert und mit dem Bluetooth Signal verbunden. Er vereinfacht ein präzises Fahren und Ausbringen von Saatgut oder Dünger [2]. Die FA Topcon bietet ebenfalls auf GNSS-Basis Empfänger für die Landwirtschaft an [4]. Weiterhin finden sich die Deutz-Fahr die GNSS-Empfänger des Modelltyps SR und SRC [5].
¶ Einsatz in der Landwirtschaft
Die Einsatzgebiete von GNSS-Sensoren in der Landwirtschaft überschneiden sich mit vielen anderen Bereichen. Das betrifft zum einen die Vermessung bzw. Kartierung. Dabei werden GNSS-Werte genutzt um Punkte, Linien oder sogar Flächen zu vermessen und zuzuordnen [6]. Diese Anwendungsform wird unter anderem in der Bauindustrie genutzt, um Gebäude zu stellen oder auch auf den Katasterämtern beispielsweise zur Vermessung von Straßenverläufen oder Gebäuden, die noch nicht vermessen wurden. Im Regelfall werden die Daten in einem Geoinformationssystem (GIS) (als Ackerschlagkartei) gespeichert und dargestellt. Die Vermessung kann unter anderem verbunden werden mit Bodenproben oder Bonitur [6].
Weitere Nutzung von GNSS findet sich in Lenksystemen. Zwischen zwei Punkten wird dazu mittels Koordinaten eine Referenzlinie erzeugt. Bei Parallelführungs- und Lenksystemen werden dazu parallele Linien erzeugt [6]. Neben Linien ist auch die Erzeugung von Kurven möglich. Durch die Lenksysteme können nur bewachsende Flächen bearbeitet werden, indem eine räumliche Einschränkung von Saatgut oder Dünger realisiert wird [6]. Um CTF (Controlled Traffic Farming) umzusetzen müssen RTK-Genauigkeiten verwendet werden.
Weiterführend können Satellitenortungssysteme auch Anbaugeräte in Teilbreiten oder Einzelreihen ansteuern. Mit der ermittelten Position aus den GNSS-Daten, werden am Anbaugerät die Teilbreitenpositionen bestimmt. Sinn hinter dieser Section control ist, dass an bereits bearbeiteten Stellen die Teilbreiten partiell abgeschaltet werden. Durch eingesparte Ressourcen wirkt sich dies positiv auf die Kosten aus. Je nach Anbaugerät kann auch die VRA Methode (variable rate application) angewandt werden. Werden Sollwerte der Düngung in der Applikationskarte hinterlegt, so werden diese beim Befahren der Fläche vom Gerät automatisch eingestellt. [6]
Neben Steuerungsfunktionen werden die GNSS-Messwerte auch zur Dokumentation genutzt. Sinnvoll ist dies wenn z.B. Verbrauchsmaterialien damit verknüpft werden. Unter anderem Benzinverbrauch, Erntemenge oder andere auf die Maschine oder das Feld bezogene Daten [6]. So lassen sich Analysen hinsichtlich Prozessoptimierung vereinfachen.
Abschließend ist also festzustellen, dass Positionsdatenempfänger mittlerweile undenkbar sind, da sie für eine Vielzahl an Anwendungen, die nicht einmal zwingend landwirtschaftlicher Natur sind, genutzt werden.
¶ Anwendungsbereich
¶ Quellen
- Wie funktioniert ein GNSS-Empfänger?: OXTS
- FieldBee RTK-Empfänger: FieldBee
- Was ist der Unterschied zwischen GNSS und GPS Empfängern: FieldBee
- GNSS-Empfänger für die Landwirtschaft: Topcon
- GNSS-Empfänger. Empfänger für die manuelle und Automatische Spurführung. Deutz-Fahr.
- Satellitenortungssysteme (GNSS) in der Landwirtschaft. Noack, O.P.
¶ weiterführende Quellen
- Ein neuer Satellitenpositionierungsdienst für Deutschland: Riecken, J. & Becker, P.
- Zur Entwicklung und Bewertung der absoluten GNSS-Antennenkalibrierung im HF-Labor. Zeimetz, P.
- RTK-Netzwerke zur flächendeckenden hochgenauen Positionsbestimmung in der Landwirtschaft Reckleben, Y. und Noack, P.
¶ Autoren
Michael Wagner, Technische Zentralstelle Dienstleistungszentrum Ländlicher Raum Rheinhessen-Nahe-Hunsrück (TZ DLR-RNH)