¶ Spurenerfassung (georeferenziert)
Satellitenortungssysteme (Global Navigation Satellite System) wurden durch Anregung des Militärs entwickelt. Erste Schritte in der Landwirtschaft wurden Anfang der 1990er Jahre zur Optimierung der Produktion getätigt. Die ersten erstellten Ertragskarten zeigten, dass Erträge auf Teilflächen abwichen. Aus der Idee, Teilflächen standortangepasst mittels GPS zu bewirtschaften, etablierte sich der Begriff Precision Farming oder Precision Agriculture [1].
¶ Beschreibung
GNSS bestehen aus Raum- und Bodenkomponenten (Satellit und stationärem oder mobilem Empfänger), die mit Laufzeitmessungen Position und Richtung ermitteln [1]. Die Satelliten werden mit Strom versorgt und besitzen eine Atomuhr sowie einen Sender und Empfänger, um Kontakt zur Bodenkomponente herzustellen und selbst Signale zu senden. Die Frequenzspanne liegt zwischen 1,2 – 1,6 GHz und ist mit einem Zeitstempel (Pseudo Random Noise (PRN) – Code) und Satellitenkennung (Space Vehicle Number (SVN)) gekennzeichnet [1].
Die Bodenkomponente enthält Kontrollstationen zur Überwachung und potentiellen Korrektur der Flugbahn des Satelliten. Zusätzlich überwachen sie die Funktion und melden Fehlerfälle. Abweichungen der Satellitenflugbahn und der Uhren werden in sog. Ephemeriden notiert. Diese werden den Empfängern zur Verfügung gestellt [1].
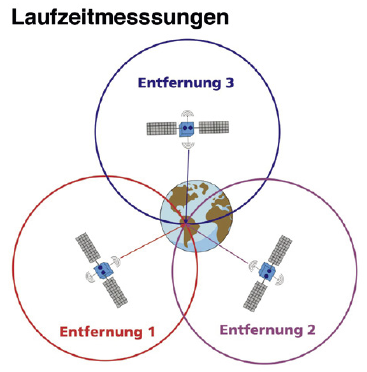
Die Laufzeitmessungen (Abb. 1) finden mit Hilfe von Sextanten statt, die die Winkel zwischen Sternen berechnen. Über Triangulation und Trilateration wird die Position bestimmt. Der vom Satellit gesendete Zeitstempel der Atomuhr bestimmt nach Eintritt beim Empfänger die Dauer (Laufzeit) zwischen beiden Stationen. Die Entfernung wird unter der Annahme der Lichtgeschwindigkeit und der Laufzeit berechnet. Die Position des Satelliten kennt der Empfänger aus den Ephemeriden. Die Position des Empfängers wird dann aus den Daten bestimmt [1].
Um die Genauigkeit von GNSS zu verbessern werden Korrektursignale eingesetzt (Abb. 2).
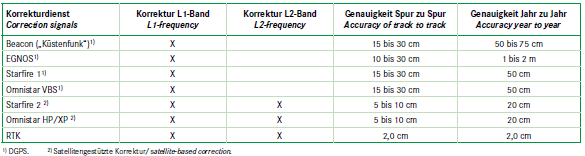
Nur einige der Korrektursignale sind dabei kostenfrei nutzbar. Die bekanntesten Satelliten sind das GPS (USA), GLONASS (Russland), Galileo (EU) und BeiDov (VR China) [4].
Problematisch sind oft Abschaltungs- und Multipatheffekte durch eine verschlechterte direkte Sichtverbindung bzw. durch Brechung und Reflektion des GPS-Signals [5].
¶ Satellitenortungssysteme in der Landwirtschaft
Ortungssysteme lassen sich beispielsweise in der Lenkführung von Fahrzeugen einsetzen. Es werden unter anderem zwischen Assistenzsysteme und automatische Lenksysteme unterschieden [3]. Ersteres ist fast überall nachrüstbar, aber ungenauer (ebenda). Automatisierte Lenksysteme sind seit 2002 auf dem Markt verfügbar. Sie haben aber den Nachteil, dass sie den Fahrer selbst noch nicht ersetzen können verglichen mit sog. autonomen Systemen, weil sie keinen Einfluss auf die Geschwindigkeit oder Wendevorgänge haben [7]. GPS-Lenksysteme sind die Weiterführung der Parallelführungssysteme (ebenda). Die GNSS-Systeme können dabei Prozessdaten (Ertrag, Verbrauch und Mengen) dokumentieren [1].
¶ Anwendung
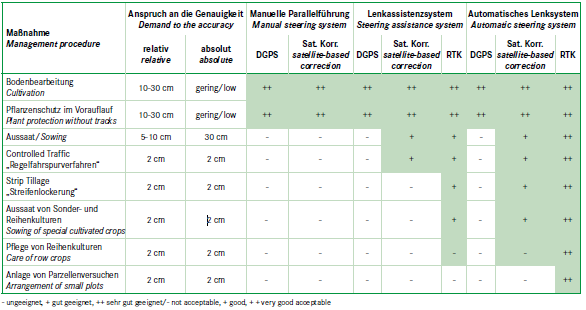
Satellitenortungssysteme finden vor allem in der Spurenerfassung eine Rolle. So auch im Regelspurverfahren (Controlled Traffic Farming). Dazu sind in Deutschland übliche Landmaschinen zugelassen [6]. Das CTF ist ein Beet-System, bei dem Spurtbreiten aufeinander abgestimmt sein müssen. Die Vorteile des Systems lassen sich nur dann erreichen, wenn ein Befahrungsplan eingehalten wird. Dann lässt sich ein Anteil zwischen 58% und 67% nicht befahrener Fläche schaffen. Dies resultiert in besserer Wasserverfügbarkeit, optimierten Erträgen sowie Boden- und Klimaschutz [6; 2]. Die weiteren Anwendungsbereiche verschiedener GPS-gestützter Systeme zeigt Abbildung 3.
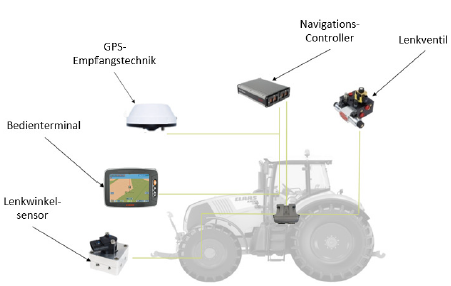
Einige Systeme wie beispielsweise das der Fa. Steyr sind komplett ISOBUS-Kompatibel [8]. In Traktoren bedarf es hierbei einer Empfangsantenne und eines GNSS-Receivers, einem Terminal, Lenkkommando und Navigations-Controller (Abb. 4) [4].
¶ Anwendungsbereich
Hier folgen passende Praxisbeispiele von FARMPRAXIS
¶ Quellen
- Satellitenortungssysteme (GNSS) in der Landwirtschaft DLG-Merkblatt 388; DLG & Prof. Dr. Patrick Ole Noack
- Mit Fahrspur-Management weniger Bodenverdichtung; Case ICH
- RTK-Netzwerke zur flächendeckeden hochgenauen Positionsbestimmung in der Landwirtschaft; Yves Reckleben & Patrick Ole Noack
- Fahrspur- und Routenplanung für teilautonome, GNSS-gestützte Landmaschinen; Dennis Sabelhaus
- Untersuchung eines Koppelsystems zur Unterstützung der autonomen Positionierung landmobiler Anwendungen mit GPS; Schwenke T. & Auernhammer H.
- Das Regelfahrspurverfahren - technische und organisatorische Realisierung; Demmel et al.
- GPS gestützte automatische Lenksysteme; Patrick Ole Noack
- Steyr Broschüre Lenksysteme
¶ Autoren
Michael Wagner, Technische Zentralstelle Dienstleistungszentrum Ländlicher Raum Rheinhessen-Nahe-Hunsrück (TZ DLR-RNH)